
Navigation mit dem Turtlebot 4
Eine Projektarbeit von Julian Kühne und Sebastian Matz betreut von Sophie Charlotte Keunecke am IGMR der RWTH
Ziel der Projektarbeit
Inbetriebnahme eines Turtlebot4 mit ROS2 Humble auf einem Ubuntu 22.04, Implementierung externer Sensoren und Ausführen eines Navigationsszenarios. Dieses Repository soll der Dokumentation unserer Arbeit dienen und sie für andere zugänglich machen.
Struktur der Dokumentation
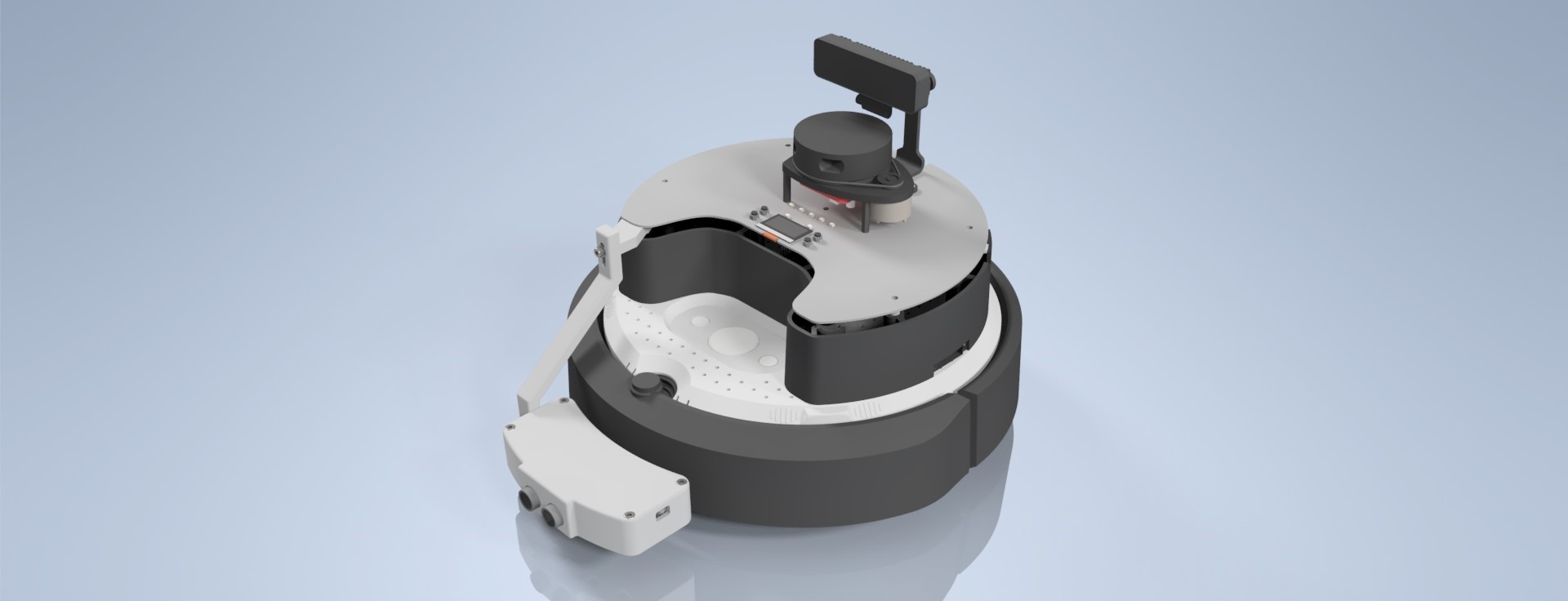
Der Turtlebot 4

Turtlebot 4
Ein TurtleBot 4 ist ein robuster und vielseitiger mobiler Roboter, der speziell für Forschung, Lehre und Entwicklung im Bereich Robotik konzipiert wurde. Es handelt sich um eine der neuesten Versionen der TurtleBot-Serie, die auf dem ROS (Robot Operating System) basiert und für die Verwendung mit ROS 2 Humble optimiert ist. Der TurtleBot 4 ist auf einem Raspberry Pi 4 aufgebaut und bietet eine Plattform für Experimente und Anwendungen in der Robotik.
GPT zu dieser Projektarbeit
ChatGPT ist sehr hilfreich bei der Arbeit mit dem Turtlebot. Wir haben ein GPT-Modell mit allen zu unserer Projektarbeit relevanten Daten trainiert und stellen das hier zur Verfügung: Navigation mit dem Turtlebot 4.